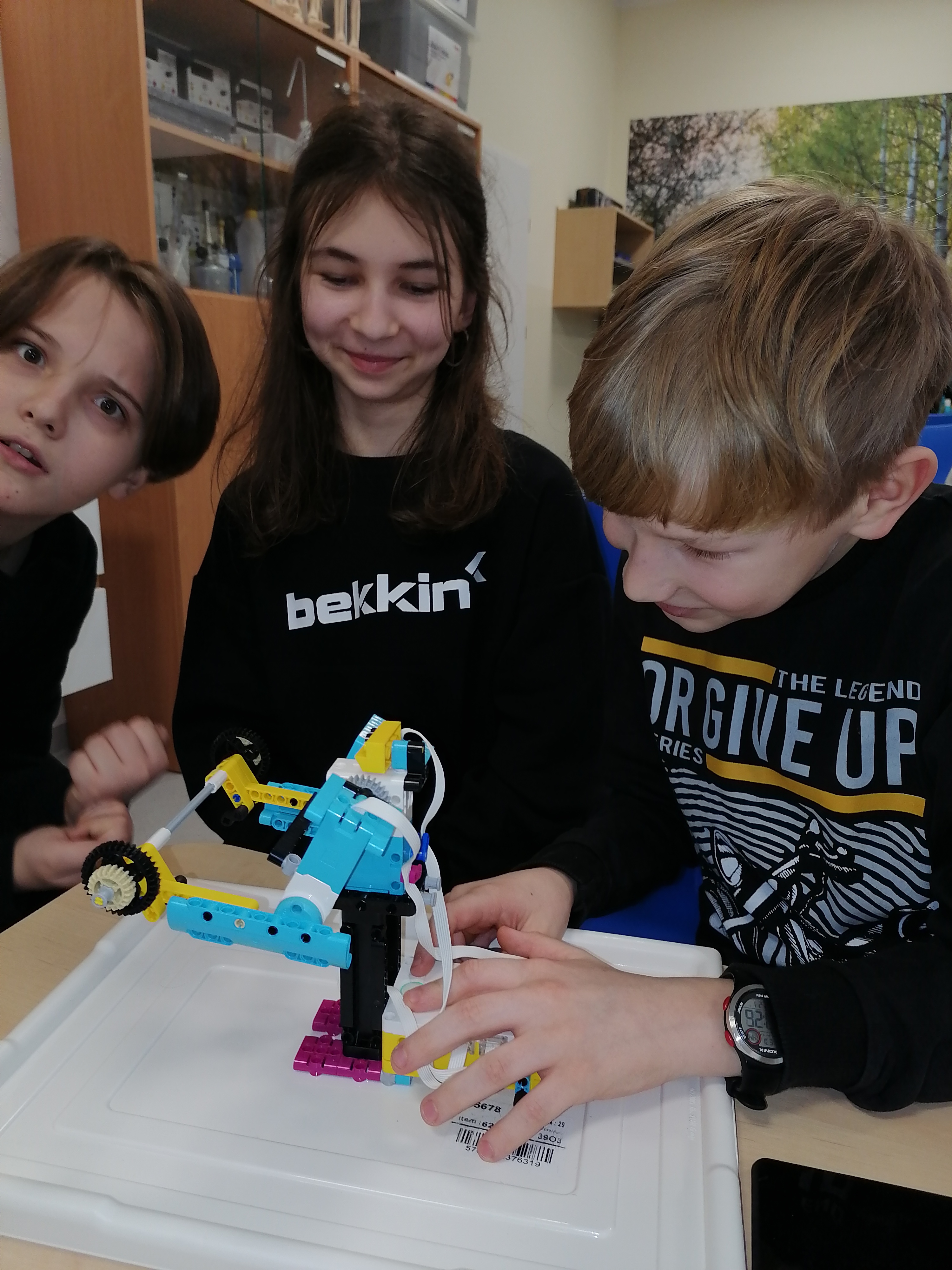
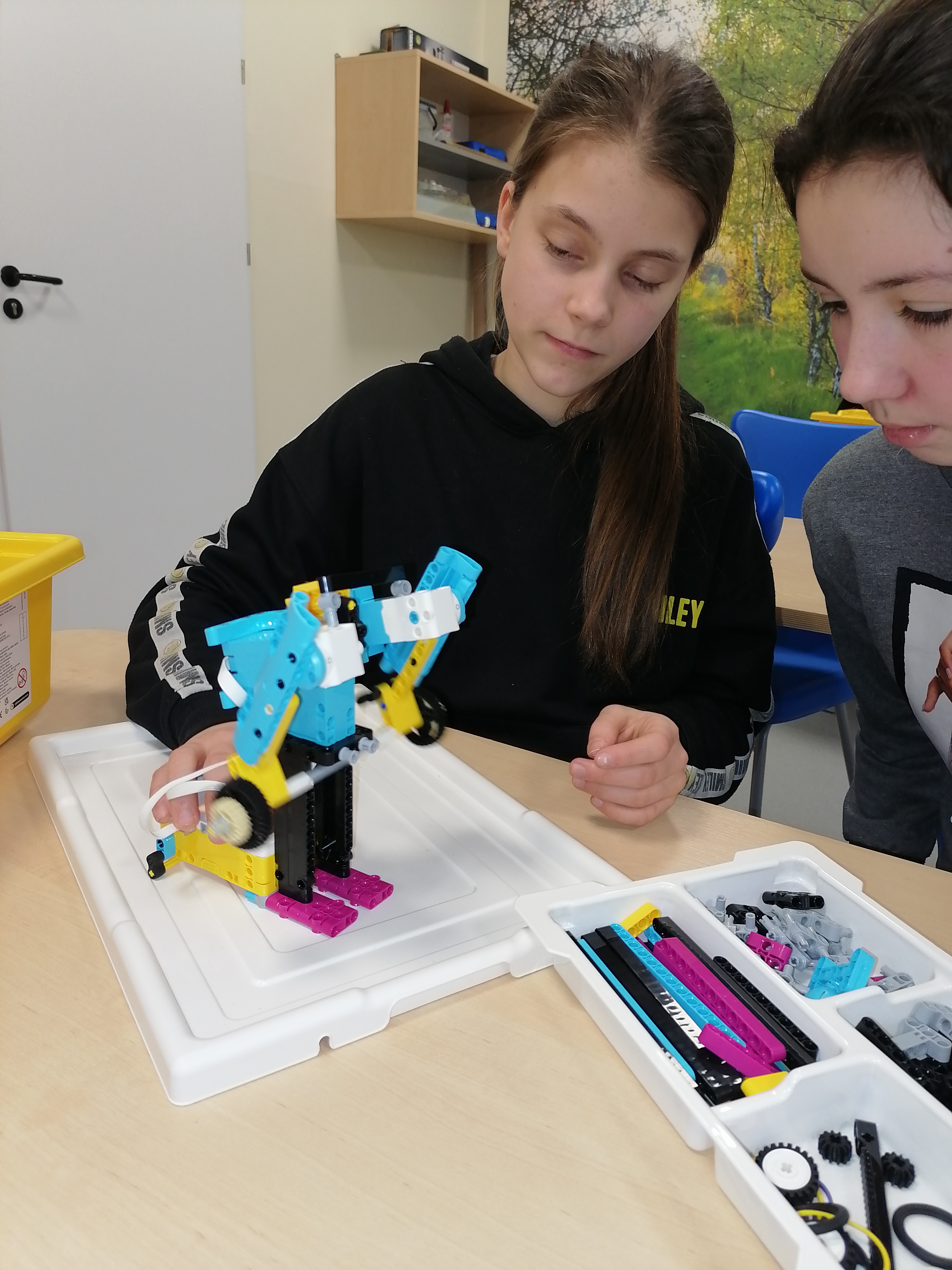
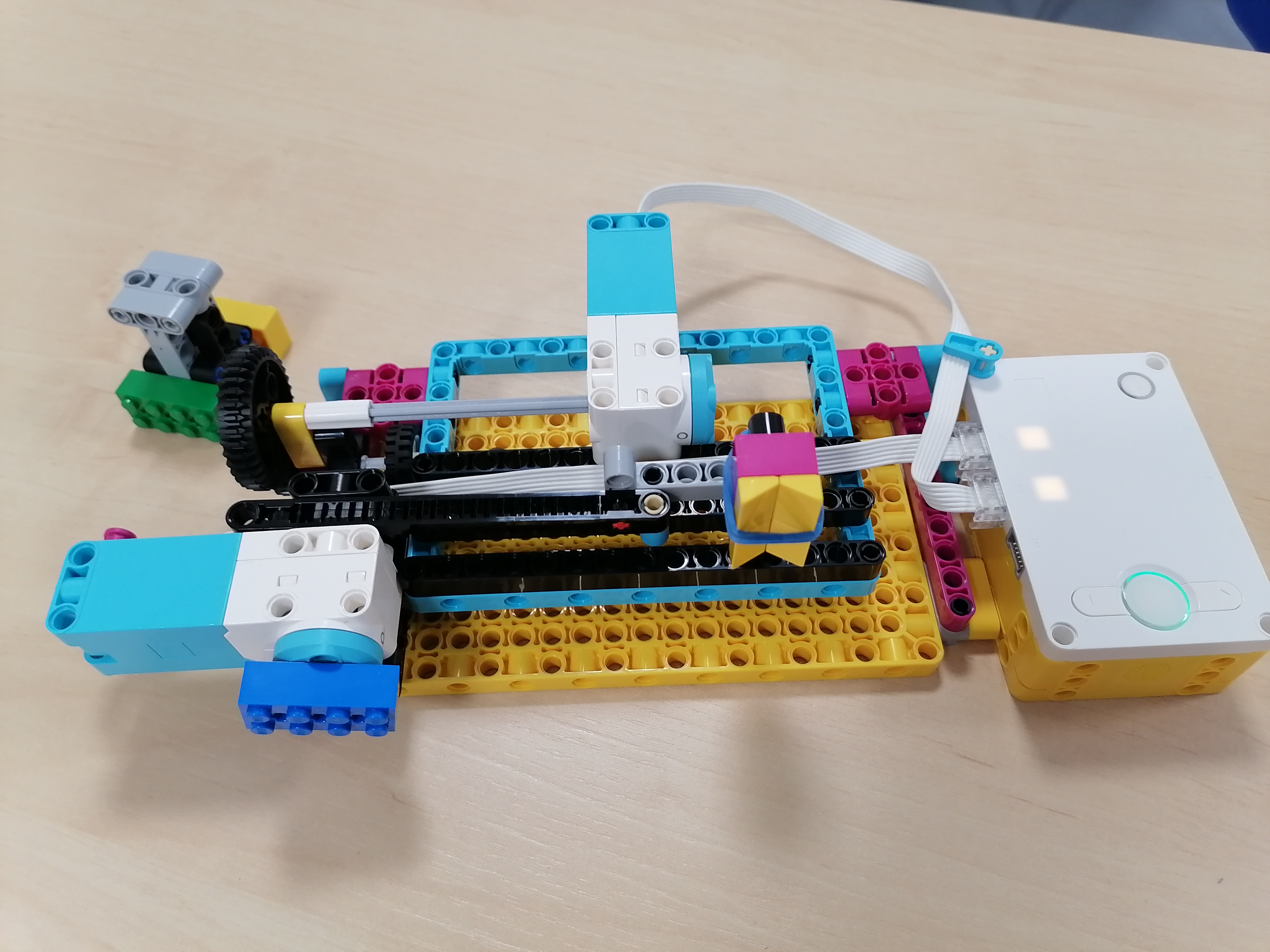
W ramach Projektu edukacyjnego LEGO SPIKE ProLog z informatyki odbyły się kolejne zajęcia w klasie VI. Pierwszy z tematów – „Przepis na program” stanowił znakomite uzupełnienie lekcji z działu w którym uczniowie ucz się programować w Scratchu. Głównym etapem zajęć była budowa i zaprogramowanie robota w taki sposób, aby mechanizm ramienia robota obracał się w przód oraz w tył, uderzając przy tym obiekt w stronę zbudowanej bramki. Uczniowie zaprogramowali go według stworzonego przez siebie schematu blokowego. Podstawowe pomoce dydaktyczne stanowiły: zestaw Lego Education Spike Prime, tablety z instrukcją budowy robota oraz aplikacją do programowania.. Efektem pracy dwuosobowych grup był model robota, który przemieszczał ramionami piłkę w stronę bramki
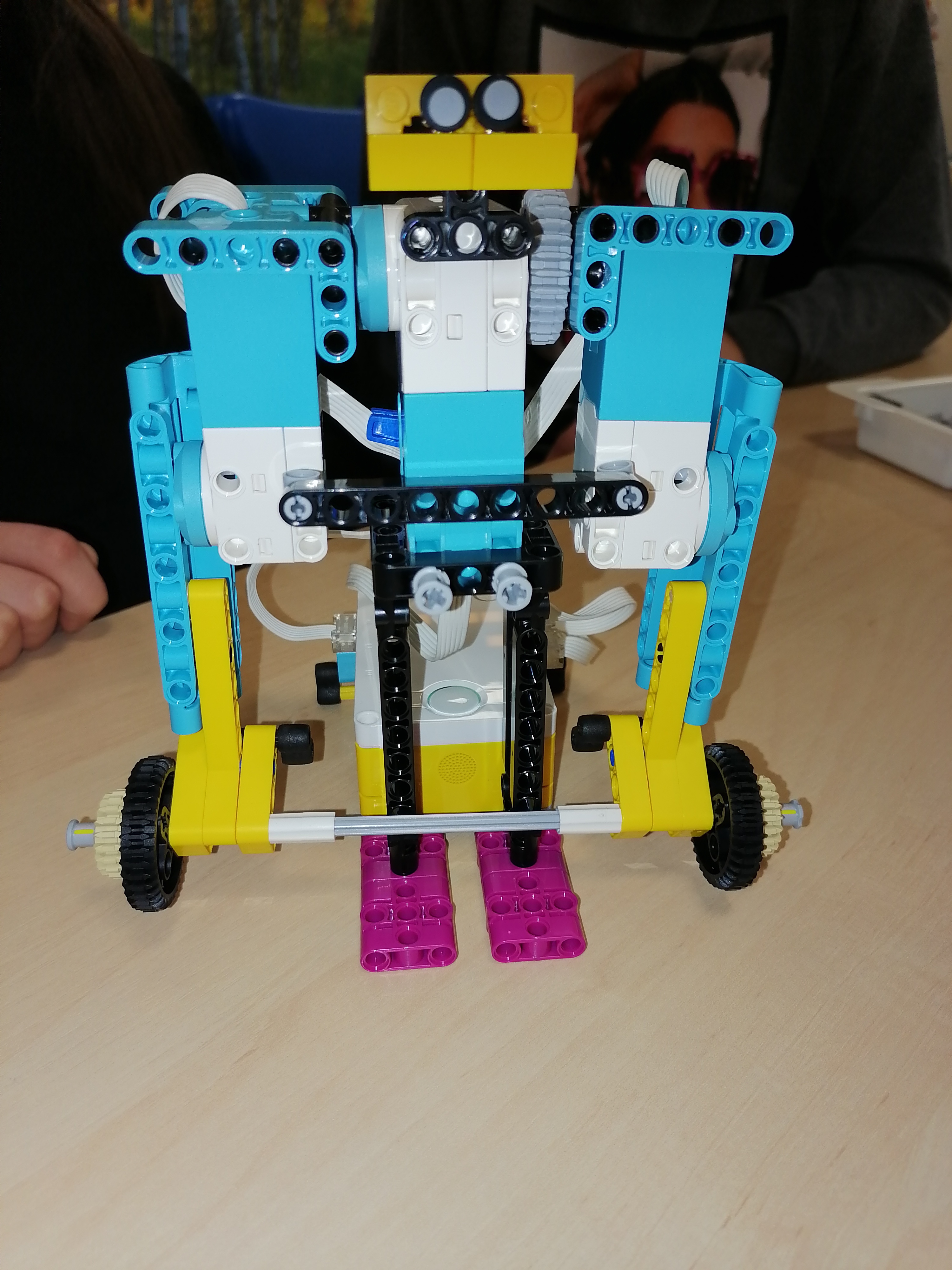
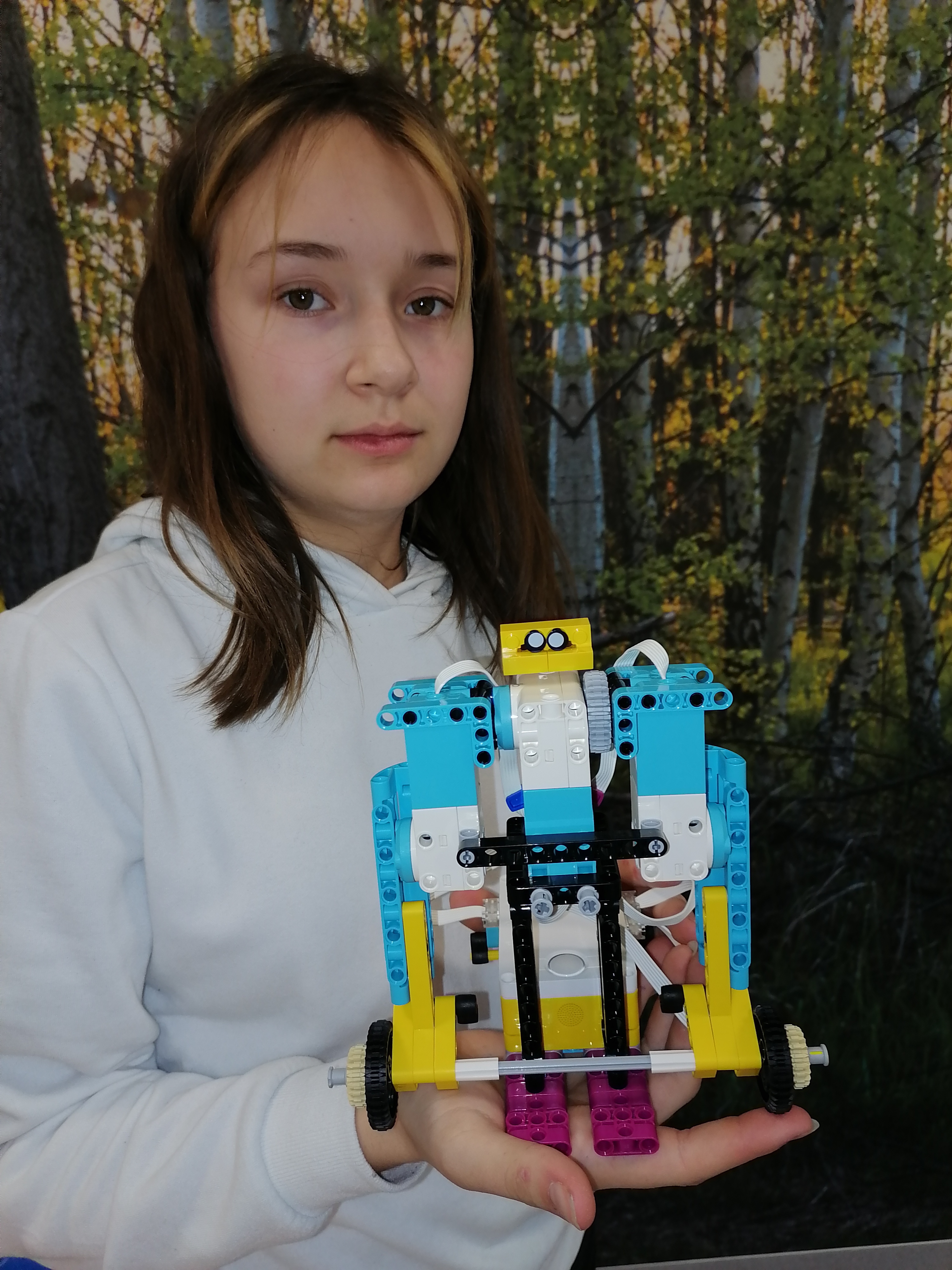
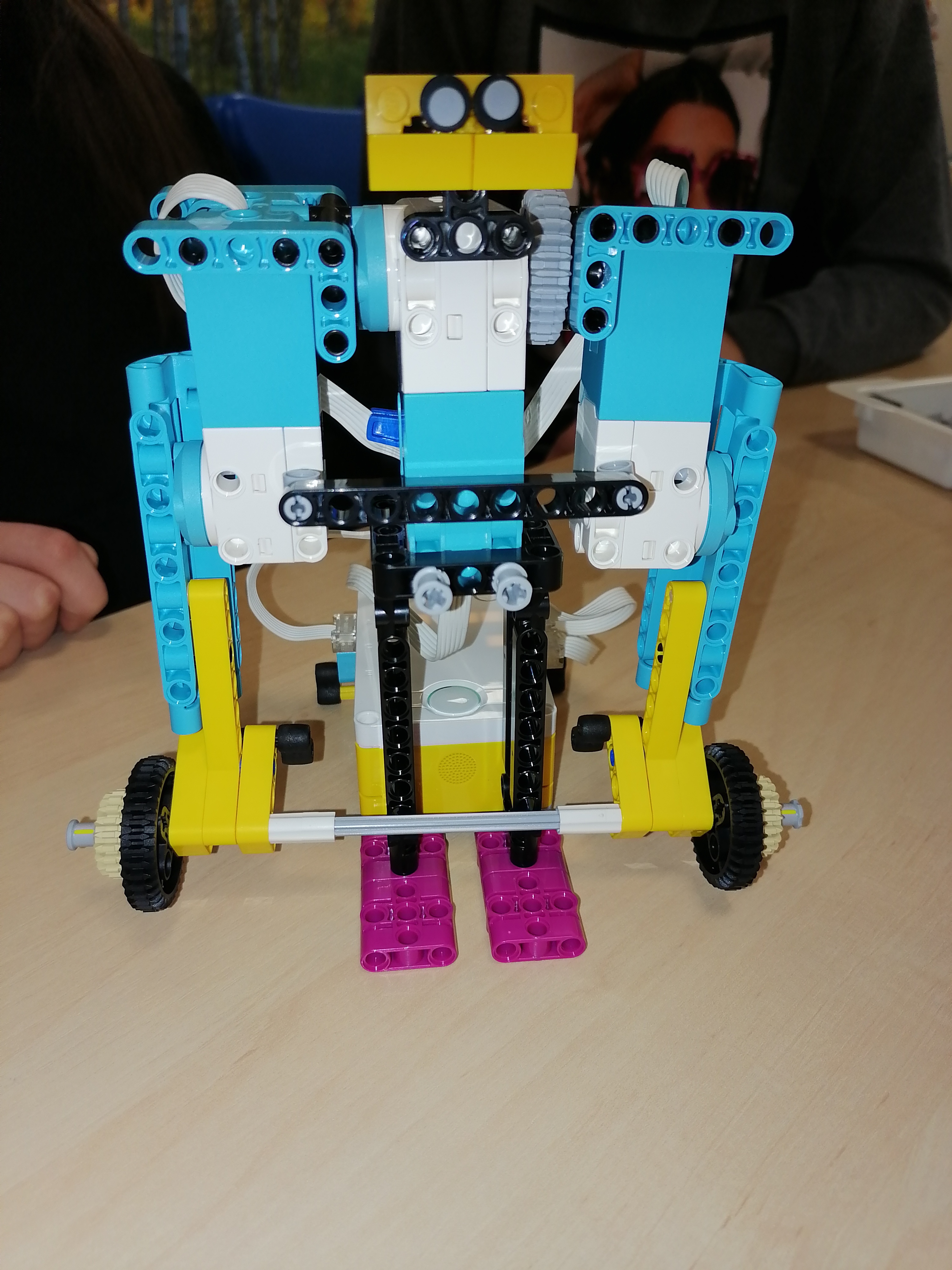
Na kolejnych zajęciach realizowany był temat „Graficzna prezentacja wyników”. W odniesieniu do programu nauczania informatyki – zajęcia z robotyki łączyły treści z klasy VI z działu „Razem możemy więcej O społeczności użytkowników Scratcha”. Głównym etapem lekcji było zbudowanie robota, który będzie wykreślał figury geometryczne . W tej części przydatna była instrukcja budowy skryptu na rysowanie kwadratu i instrukcja z zastosowaniem czujnika koloru wyświetlona na tablicy interaktywnej. Gdy już robot działa poprawnie zrobiliśmy z uczniami krótkie przypomnienie związane z podstawowymi właściwościami wielokątów – miarami kątów oraz długościami boków. Następnie uczniowie przygotowali w zespołach algorytmy rysowania figur oraz zaprezentowali je w postaci schematu blokowego. Pary miały przydzielone różne figury geometryczne (np. kwadrat, koło, romb, sześciokąt foremny). Poprawnie zaprogramowany robot narysował wskazaną figurę. Na kolejnych zajęciach realizowany był temat „Analiza danych”. Na tych zajęciach uczniowie tworzyli programy, które odpowiadały za sterowanie robotem, tworzenie animacji ruchu oraz tworzenie wykresów. Głównym etapem zajęć była budowa robota –„Olbrzym”, który swoim wyglądem przypomina sztangistę podnoszącego ciężar w postaci sztangi jak prawdziwy sportowiec. Po zbudowaniu robota, zadaniem uczniów było zaprogramowanie robota w taki sposób, aby wykonywał ruch podnoszenia ciężarów, zmieniając przy tym wartość zmiennej odpowiadającej za ilość spalonych kalorii o losową wartość. Stworzymy w tym celu trzy programy – pierwszy, odpowiadający za animację ruchu robota, drugi – za pomocą którego robot wykonywał ruch przedstawiony na animacji oraz trzeci –dane dotyczące spalonych kalorii przedstawiane były na wykresie liniowym. Zajęcia, oprócz funkcji dydaktycznej, były okazją do świetnej zabawy.
Tekst i zdjęcia: Marek Zieliński












13-220 Rybno
Rumian 12

 sprumian@wp.pl
sprumian@wp.pl +48 23 696 60 01
+48 23 696 60 01